Geometrie, Teil B, Aufgabengruppe 2
🎓 Prüfungsbereich für Bayern
Weitere Bundesländer & Aufgaben:
Mathe- Prüfungen Startseite
Austausch & Hilfe:
Prüfungen-Discord
Die Aufgabenstellung findest du hier zum Ausdrucken als PDF.
- 1
Für die Fernsehübertragung eines Fußballspiels wird über dem Spielfeld eine bewegliche Kamera installiert. Ein Seilzugsystem, das an vier Masten befestigt wird, hält die Kamera in der gewünschten Position. Seilwinden, welche die Seile koordiniert verkürzen und verlängern, ermöglichen eine Bewegung der Kamera. In der Abbildung ist das horizontale Spielfeld modellhaft als Rechteck in der -Ebene eines kartesischen Koordinatensystems dargestellt. Die Punkte , , und beschreiben die Positionen der vier Seilwinden. Eine Längeneinheit im Koordinatensystem entspricht in der Realität, d. h. alle vier Seilwinden sind in einer Höhe von angebracht.
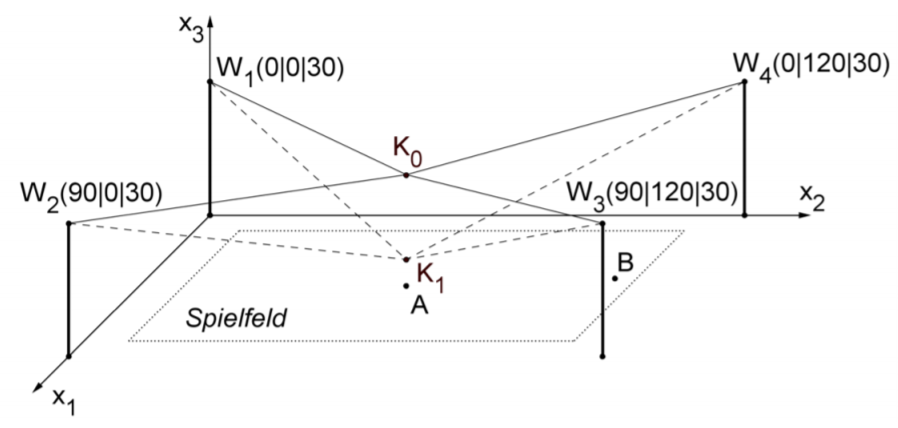
Der Punkt beschreibt die Lage des Anstoßpunkts auf dem Spielfeld. Die Kamera befindet sich zunächst in einer Höhe von vertikal über dem Anstoßpunkt. Um den Anstoß zu filmen, wird die Kamera um vertikal abgesenkt. In der Abbildung ist die ursprüngliche Kameraposition durch den Punkt , die abgesenkte Position durch den Punkt dargestellt.
Berechnen Sie die Seillänge, die von jeder der vier Seilwinden abgerollt werden muss, um dieses Absenken zu ermöglichen, wenn man davon ausgeht, dass die Seile geradlinig verlaufen. (4 BE)
Kurze Zeit später legt sich ein Torhüter den Ball für einen Abstoß bereit. Der Abstoß soll von der Kamera aufgenommen werden. Durch das gleichzeitige Verlängern beziehungsweise Verkürzen der vier Seile wird die Kamera entlang einer geraden Bahn zu einem Zielpunkt bewegt, der in einer Höhe von über dem Spielfeld liegt. Im Modell wird der Zielpunkt durch den Punkt beschrieben, die Bewegung der Kamera erfolgt vom Punkt entlang der Geraden mit der Gleichung , , zum Punkt .
Bestimmen Sie die Koordinaten von . (3 BE) (Ergebnis )
Im Zielpunkt ist die Kamera zunächst senkrecht nach unten orientiert.Um die Position des Balls anzuvisieren, die im Modell durch den Punkt beschrieben wird, muss die Kamera gedreht werden.Berechnen Sie die Größe des erforderlichen Drehwinkels. (4 BE)
Der Torwart führt den Abstoß aus. Der höchste Punkt der Flugbahn des Balls wird im Modell durch den Punkt beschrieben.
Ermitteln Sie eine Gleichung der durch die Punkte , und festgelegten Ebene in Normalenform und weisen Sie nach, dass unterhalb von liegt. (7 BE) (Mögliches Teilergebnis: )
Machen Sie plausibel, dass folgende allgemeine Schlussfolgerung falsch ist: „Liegen der Startpunkt und der anvisierte höchste Punkt einer Flugbahn des Balls im Modell unterhalb der Ebene , so kann der Ball entlang seiner Bahn die Seile, die durch und beschrieben werden, nicht berühren.“ (2 BE)
Dieses Werk steht unter der freien Lizenz
CC BY-SA 4.0 → Was bedeutet das?
