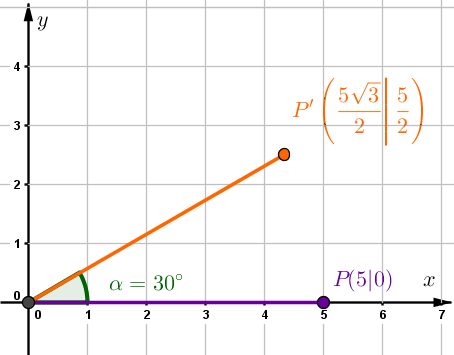
Berechne den Winkel α, um welchen der Punkt P zum Punkt P′ gedreht wurde.
P(5|0), P′(5⋅32|52)
Für diese Aufgabe benötigst Du folgendes Grundwissen: Drehung eines Punktes
x′=cosα⋅x−sinα⋅yy′=sinα⋅x+cosα⋅y
Setze die beiden Punkte P und P′ in das Gleichungssystem ein.
532=cosα⋅5−sinα⋅052=sinα⋅5+cosα⋅0
Löse die Gleichungen nach α auf.
32=cosα12=sinα⇒α=30°
(x′y′)=(cosα−sinαsinαcosα)⋅(xy)
(53252)=(cosα−sinαsinαcosα)⋅(50)
Führe die Matrix-Vektor-Multiplikation durch.
(53252)=(5⋅cosα5⋅sinα)
Schreibe die Gleichung in ein Gleichungssystem um.
532=5⋅cosα52=5⋅sinα
Löse die Gleichungen.
Kommentiere hier 👇
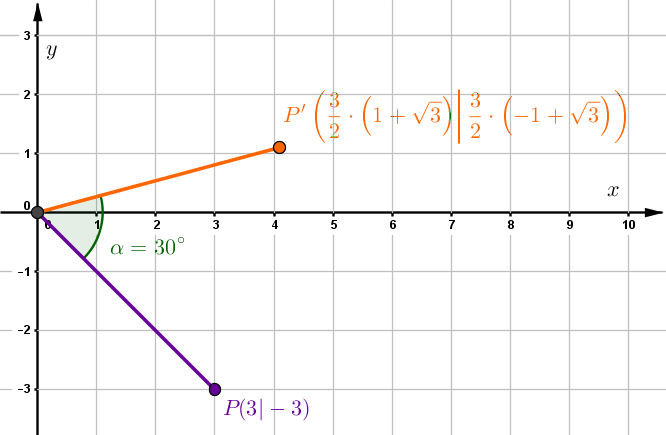
P(3|−3), P′(32⋅(1+3)|32⋅(−1+3))
32⋅(1+3)=cosα⋅3−sinα⋅(−3)32⋅(−1+3)=sinα⋅3+cosα⋅(−3)
12⋅(1+3)=cosα+sinα12⋅(−1+3)=sinα−cosα
Verwende das Addionsverfahren.
12⋅(1+3)+12⋅(−1+3)=cosα+sinα+sinα−cosα12⋅(1+3)+12⋅(−1+3)=2⋅sinα3=2⋅sinα32=sinα⇒α=60°
Vereinfache die Gleichung.
(32⋅(1+3)32⋅(−1+3))=(cosα−sinαsinαcosα)⋅(3−3)
(32⋅(1+3)32⋅(−1+3))=(cosα⋅3−sinα⋅(−3)sinα⋅3cosα⋅(−3))⋅
12⋅(1+3)=cosα+sinα12⋅(−1+3)=sinα−cosα⇒α=60°
Bitte melde dich an, um diese Funktion zu benutzen.