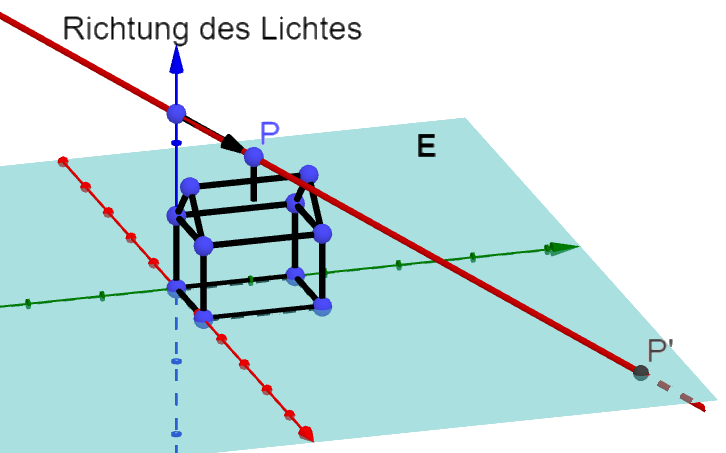
1. Projektion auf eine Ebene:
Ein beliebiger Punkt wird auf eine gegebene Ebene projiziert.
a) Bestimmung der Projektionsmatrix für eine Projektion in die -Ebene
Ein typisches Beispiel:
Der Schattenwurf eines gegebenen Punktes (z.B. Schornstein eines Hauses, siehe Abbildung)
auf eine gegebene Ebene .
Gleichung der Ebene
Richtung der Sonnenstrahlen:
Ein beliebiger Punkt des Hauses:
Gesucht wird zum Punkt des Hauses der Bildpunkt des Schattens in der Ebene .
Erstelle die Gleichung einer Hilfsgeraden durch mit der Richtung .
Die Hilfsgerade wird mit der Ebene geschnitten.
:
Der Wert für wird in eingesetzt und man erhält die Koordinaten von .
Die Projektion in die Ebene kann auch durch eine Matrix beschrieben werden.
Es ist:
Die Matrix ist die Projektionsmatrix.
Alle Punkte des Raumes werden mit der Matrix in die Ebene abgebildet.
Es gilt:
Jeder Bildpunkt liegt in der Ebene .
Alle Punkte der Ebene sind sogenannte Fixpunkte, d.h. es sind Punkte, die bei einer Abbildung auf sich selbst abgebildet werden.
Bei einer Projektion in die Ebene gilt immer:
b) Bestimmung der Projektionsebene
Gegeben ist eine Projektionsmatrix (Nachweis mit der Beziehung ),
z.B. die Matrix
Gesucht ist die Ebene, die die Fixpunkte enthält, d.h. die Ebene, in die projiziert wird.
Fixpunktgleichung:
Man erhält drei Gleichungen:
Also dreimal die Gleichung .
Das ist die gesuchte Ebenengleichung , in die projiziert wird.
c) Bestimmung der Projektionsrichtung
Man wählt einen beliebigen Punkt im Raum, z.B. den Punkt mit den Koordinaten und projiziert ihn mit der Matrix in die Ebene , d.h. man erhält den Bildpunkt
Die Projektionsrichtung ist der Vektor
Die Projektionsrichtung ist also der Vektor .