Drehungen
Ein gegebener Punkt soll um eine Drehachse mit dem Drehwinkel gedreht werden.
Wie lautet die zugehörende Drehmatrix, mit der die Koordinaten des gedrehten Punktes bestimmt werden können?
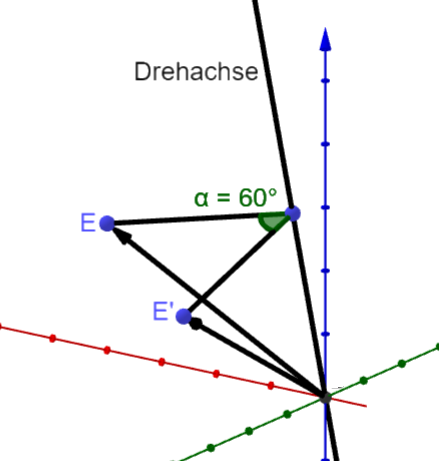
Drehung um 60 Grad um die Drehachse
Drehung um eine Drehachse mit der Drehwinkel
Die Matrix beschreibt die Drehung um eine Drehachse mit dem Drehwinkel .
Jeder Punkt der Drehachse ist ein Fixpunkt. Weiterhin gilt .
Bei der Drehmatrix sind die Spaltenvektoren paarweise orthogonal, d.h. sie stehen senkrecht aufeinander und haben jeweils die Länge .
Ist die Drehachse der Einheitsvektor und ist der Drehwinkel , dann gehört die folgende Drehmatrix zu dieser Abbildung:
Drehwinkel ist gesucht
Ist die Drehmatrix gegeben und ist der Drehwinkel gesucht, dann gilt:
Dabei ist die Spur der Matrix gleich (Summe der Diagonalelemente).
Spezielle Drehachsen
Drehung um die -Achse:
Drehung um die -Achse:
Drehung um die -Achse: