Die verschiedenen Abbildungen im Koordinatensystem können ohne Problem hintereinander ausgeführt werden.
Häufige Verknüpfungen
Jegliche Abbildungen in der Ebene können miteinander verknüpft werden. In diesem Artikel werden nur die häufigsten behandelt.
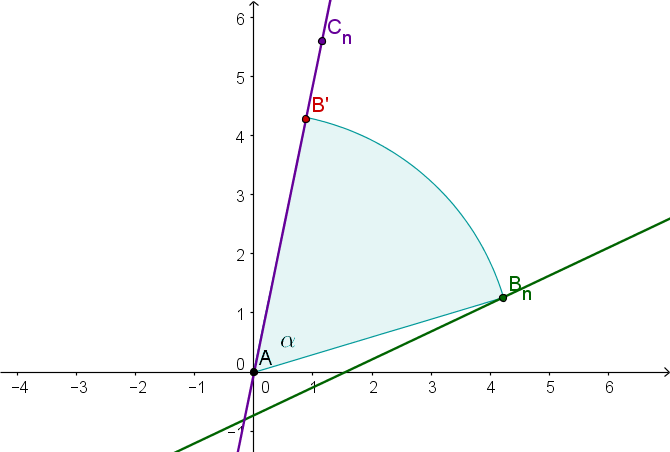
Drehung und zentrische Streckung
Hierbei wird der Punkt zuerst um den Winkel um den Punkt auf gedreht und dann um den Faktor auf den Punkt zentrisch gestreckt. Rechnerisch erreicht man dies, indem man zuerst die Drehung und dann die Streckung ausführt.
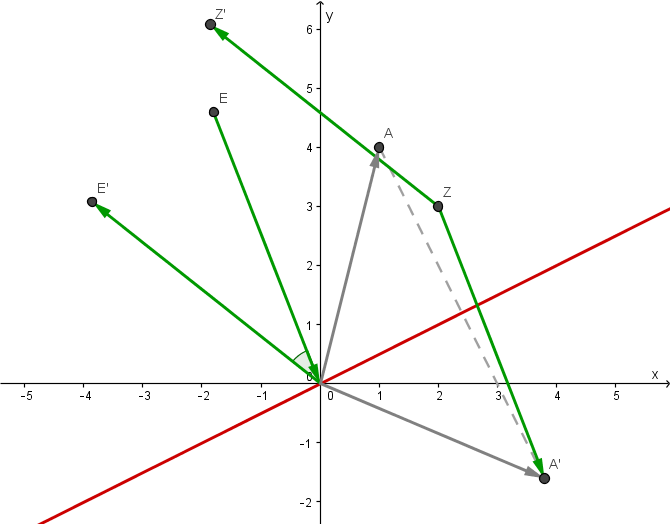
Spiegelung an einer Ursprungegeraden und Drehung
Hierbei wird der Punkt an der roten Ursprungsgeraden gespiegelt und anschließend um den grünen Winkel um das Zentrum auf gedreht.
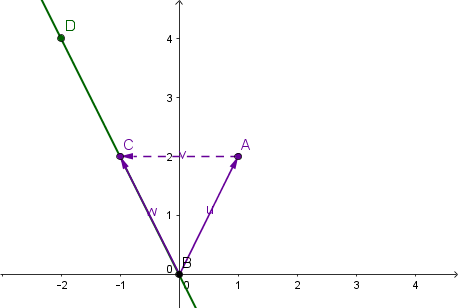
Parallelverschiebung und zentrische Streckung
Hierbei wird zuerst um den Vektor auf parallel verschoben und dann um den Faktor auf gestreckt.
Du hast noch nicht genug vom Thema?
Hier findest du noch weitere passende Inhalte zum Thema:



