Die allgemeine Geradengleichung in der analytischen Geometrie lässt sich schreiben als
h : x → = P → + λ u →
Zwei Vektoren stehen orthogonal zueinander, wenn sie senkrecht aufeinander stehen. Dies ist der Fall, falls ihr Skalarprodukt Null ergibt.
Bei Geraden überprüfst du diese Bedingung, indem du das Skalarprodukt ihrer Richtungsvektoren bildest. Der Richtungsvektor von g
A B → = ( − 2 − 1 2 )
(siehe a)).
A B → ∘ u → = 0 ( − 2 − 1 2 ) ∘ ( u 1 u 2 u 3 ) = 0 − 2 u 1 + ( − u 2 ) + 2 u 3 = 0
Allerdings bekommst du eine Gleichung mit drei Unbekannten. In solch einem Fall darfst du zwei Unbekannte frei auswählen.
Du kannst hierfür z. B. u 1 = t u 3 = t t ∈ ℝ
− 2 u 1 − u 2 + 2 u 3 = 0 − 2 t − u 2 + 2 t = 0 − u 2 = 0 u 2 = 0
Der Richtungsvektor der neuen Gerade h
u → = ( t 0 t ) = t ⋅ ( 1 0 1 )
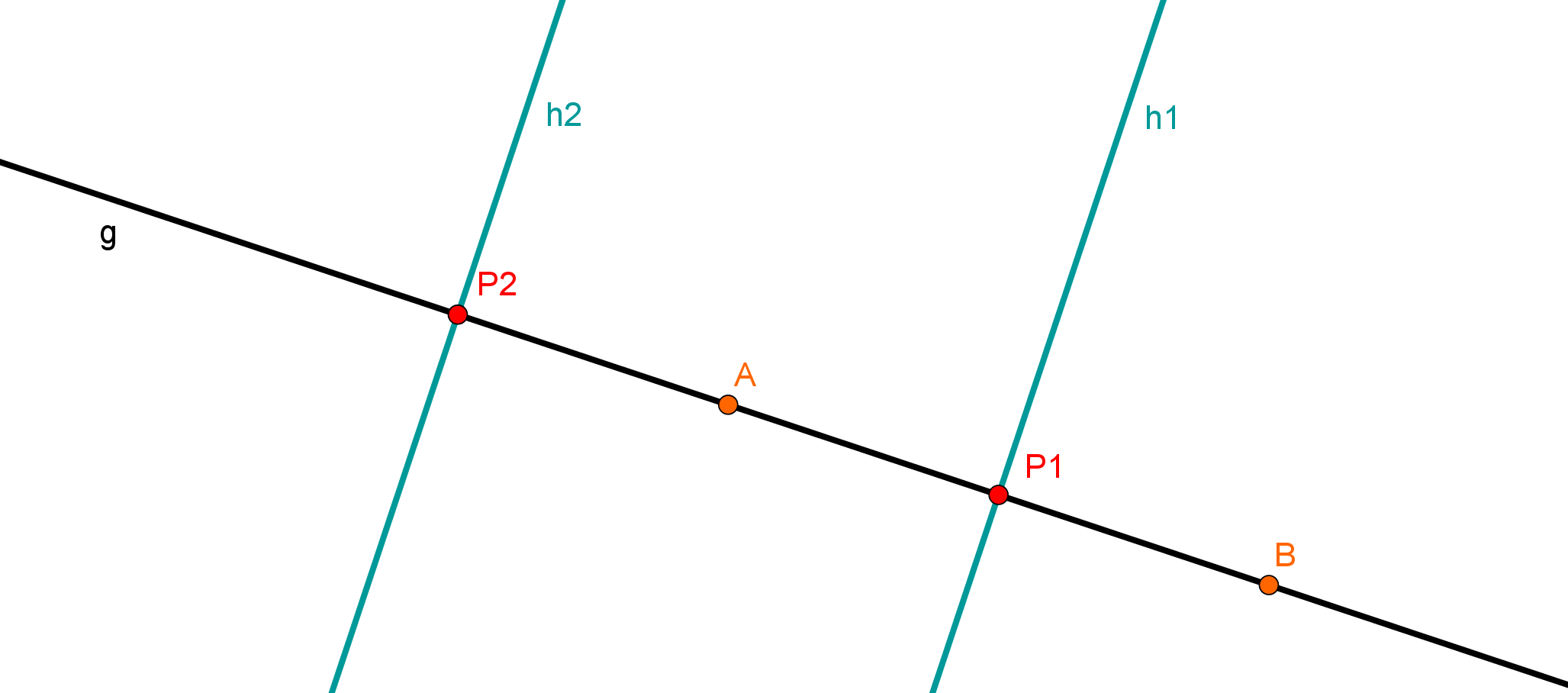
Bedingung II Es fehlt nur noch der Stützpunkt P h A g 3
Wie du auch auf dem Bild unten erkennen kannst, gibt es zwei Möglichkeiten, eine passende Gerade h
Der Stützpunkt P 1 P 2 3 A
Vielleicht fällt dir direkt auf, dass der Abstand von Punkt A B
| A B → | = | ( − 2 − 1 2 ) | = ( − 2 ) 2 + ( − 1 ) 2 + 2 2 = 9 = 3
Damit eignet sich der Punkt B
h 1 : x → = B → + u → = ( − 4 0 6 ) + t ⋅ ( 1 0 1 )
Dann bist du an dieser Stelle fertig. Wenn dir das nicht aufgefallen ist, kannst du auch folgendem, allgemeinem Schema folgen:
Normiere den Vektor A B → 1
A B → | A B → | = ( − 2 − 1 2 ) ( − 2 ) 2 + ( − 1 ) 2 + 2 2 = 1 3 ⋅ ( − 2 − 1 2 )
Multipliziere diese Normierung mit 3
3 ⋅ A B → | A B → | = 3 ⋅ 1 3 ⋅ ( − 2 − 1 2 ) = ( − 2 − 1 2 )
Nun kannst du den Stützpunkt P 1,2 h 1,2 A A
P 1 → = A → + 3 ⋅ A B → | A B → | = ( − 2 1 4 ) + ( − 2 − 1 2 ) = ( − 4 0 6 )
P 2 → = A → − 3 ⋅ A B → | A B → | = ( − 2 1 4 ) − ( − 2 − 1 2 ) = ( 0 2 2 )
Die gesuchten Geraden sind also
h 1 : x → = ( − 4 0 6 ) + t ⋅ ( 1 0 1 )
h 2 : x → = ( 0 2 2 ) + t ⋅ ( 1 0 1 )
Du musst für eine korrekte Lösung der Aufgabe allerdings nur eine von beiden Gleichungen angeben.
Kommentiere hier 👉